
UNA NUEVA PERSPECTIVA II. EL PROBLEMA DE LOS GRADOS DE LIBERTAD. LA PARADOJA DE LA TÉCNICA CORRECTA.
EL PROBLEMA DE LOS GRADOS DE LIBERTAD.
Cómo se ha comentado en el post anterior, una de las características de los sistemas complejos son los grados de libertad presentes en los mismos:
“Muchos grados de libertad, independientes y variables. El término grados de libertad, se refiere a los diferentes componentes de un sistema, que pueden encajar entre sí de muchas maneras diferentes. La complejidad de este sistema dependerá del número de potenciales configuraciones disponibles de las diferentes partes del sistema. Por ejemplo, cuando Rafa Nadal realiza un golpe de revés, puede optar por infinitas configuraciones de golpeo, en función de los grados de flexión de su hombro, de su codo o de su muñeca, con distintos resultados. Otro ejemplo sería, cualquier juego con reglas simples que planteamos en nuestras clases, dependiendo de las reglas del mismo, los distintos participantes podrán interactuar con diferentes grados de libertad. En el juego de “tú la llevas”, el número de participantes, el espacio, afectará a los distintos componentes y aumentará o reducirá los grados de libertad del sistema”
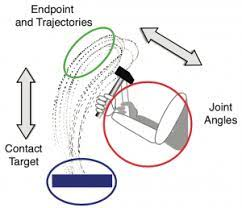
Los trabajos de Bernstein (1967) sobre cómo formular el problema de los sistemas de movimiento para dominar la redundancia de grados de libertad (DOF) de un sistema, sirvieron de inspiración para contextualizar el marco de trabajo de la teoría de sistemas dinámicos en el análisis del movimiento. Los grados de libertad de un sistema son definidos por las posibilidades de interacción de los elementos de un sistema entre sí. A mayor posibilidad de interacción, mayor será el número de grados de libertad y, por tanto, mayor complejidad del sistema. A nivel conductual, Bernstein argumentó que los seres humanos tienen la capacidad de eliminar o limitar parte de los grados de libertad, bloqueando articulaciones para restringir la capacidad de movimiento y como consecuencia mejorar el control del movimiento. Una vez controlados los grados de libertad aparecen sinergias musculares como estrategia neural para simplificar el control de múltiples grados de libertad. Las sinergias musculares son definidas como patrones de co-activación de los músculos que son reclutados por la señal emitida por único comando neural (Bernstein, 1967).
LA PARADOJA DE LA TÉCNICA CORRECTA.
Históricamente siempre hemos enseñado la técnica de los deportes usando la repetición y la corrección sobre lo que consideramos la técnica correcta. Un nuevo concepto aparece aportando una nueva perspectiva, la “repetición sin repetición”.
Para explicar este concepto debemos hacer referencia nuevamente a Nicolai Bernstein, que a principios del siglo 20 realizó diferentes estudios en los que nos muestra que la variabilidad motora es irremediable y omnipresente. En sus estudios comprobó que en la realización de cualquier movimiento nunca se hacen dos repeticiones exactamente iguales. Más recientemente, Scott Kelso, en sus distintos estudios aporta más luz: “no existe una sola combinación entre estructura y función. Podemos realizar una tarea usando diferentes componentes o diferentes tareas usando los mismos componentes”. Por el contrario, el sistema, en función de la información percibida, se autoorganiza generando una coordinación de diferentes partes del cuerpo y permitiendo que los movimientos emerjan. La elección de un patrón u otro dependerá de los recursos disponibles, a nivel de organismo y entorno, que están en continuo cambio.
Por tanto, si esa variabilidad en los movimientos aparece irremediablemente por qué nos empeñamos en corregir un gesto y repetir siempre el mismo movimiento. Esa variabilidad no debe ser entendida como un error, sino como parte del proceso de auto-organización.
Por tanto, a la hora de diseñar un ejercicio no debemos focalizar en la realización del gesto de manera concreta, más bien deberemos diseñar tareas a través de constreñimiento para que el sistema se auto-organice y emerjan las respuestas deseadas. Nuestro alumnado se auto-organizará de la mejor manera posible para dar respuesta a los constreñimientos.
ENFOQUE TRADICIONAL BASADO EN LA REPETICIÓN VS ENFOQUE BASADO EN LA VARIABILIDAD

FASES PARA LA ADQUISICIÓN DE HABILIDADES MOTORAS
Bernstein define tres fases para la adquisición de habilidades motoras:
Fase 1. Freezing degrees of freedom. Podríamos traducir esta fase como congelación/reducción de los grados de libertad. En esta fase, los sistemas dinámicos complejos(en nuestro caso nuestros alumn@s), en la primera fase de aprendizaje eliminan la participación de algunas articulaciones en la realización del gesto, reduciendo los grados de libertad, es decir simplifican el sistema. Por ejemplo, si pensamos en un niño cuando aprende a caminar, a todos nos viene la imagen de la rigidez de sus extremidades inferiores. La articulación de la rodilla y el tobillo tienden a la rigidez, con lo que la cantidad de grados de libertad del sistema se simplifica.
Fase 2. Freeing degrees of freedom. Podríamos traducir esta fase como liberación de grados de libertad. En esta fase de la adquisición de habilidades motoras, los sistemas complejos van liberando progresivamente grados de libertad, acercándose cada vez más al patrón óptimo de movimiento. Si hacemos referencia al ejemplo anterior, cuando un niño aprende a caminar, durante esta fase, empezará a desaparecer la rigidez en determinadas articulaciones, apareciendo cada vez el patrón de la marcha más fluido.
Fase 3. Motor synergies. Podríamos traducir esta fase como la fase de sinergias motoras. En esta fase el sistema(alumn@) encuentra la solución óptima de movimiento.
Esta solución óptima, ha sido tradicionalmente entendida cómo la técnica correcta, y única solución de movimiento que debía ser reproducida, la que realizan y comparten los deportistas profesionales. Pero desde la perspectiva de Bernstein debemos matizar el significado de movimiento óptimo. Cada sistema(alumn@) tiene su propia dinámica intrínseca y sus propios constreñimientos individuales. Esos constreñimientos están en constante cambio con el paso del tiempo. Debido a esto, no podemos decir que exista una solución de movimiento ideal para todas las personas, así como tampoco podemos decir que exista una solución de movimiento ideal para todas las repeticiones de un mismo movimiento. Debemos entender el término óptimo en términos de adaptabilidad. Una solución óptima de movimiento es aquella que satisface los constreñimientos individuales impuestos al sistema. Es decir, ser capaz de desarrollar el máximo potencial de movimiento depende de la capacidad del sistema para adaptar la solución del movimiento a los constreñimientos cambiantes. Por tanto, en esta última fase del sistema, a través de las sinergias entre las distintas articulaciones, se buscará que el sistema sea capaz de adaptarse a entornos cambiantes, típicos del deporte.
A través de estas sinergias motoras, el sistema es capaz de tener resultados estables, adaptándose a los entornos cambiantes. Por ejemplo, en un saque de voleibol, si jugamos en una pista exterior, el viento puede funcionar como un constreñimiento. Para un deportista experto, cuando el balón va por el aire antes de ser golpeado, bajo el influjo del viento, las sinergias motoras que se producen harán que emerjan variaciones en el patrón de movimiento del saque, con pequeñas variaciones en la posición de la articulación del codo, hombro y muñeca. Ese movimiento óptimo, se adaptará a los constreñimientos(viento) de manera automática.

¿TODA LA VARIABILIDAD ES POSITIVA?
Después de lo explicado anteriormente, queda claro que no debemos entender la variabilidad como un error, pero, ¿debemos entender la variabilidad siempre como algo positivo?
En primer lugar podemos diferenciar la variabilidad que aparece en el proceso de exploración. En las primeras fases del aprendizaje la variabilidad aparecerá como algo inherente, ya que el sistema necesita explorar las posibilidades de movimiento buscando solucionar el problema que se le plantea. Aquí es donde nosotros como docentes debemos diseñar los ambientes de aprendizaje para que aparezcan las soluciones óptimas, dirigiendo el proceso en el camino correcto. Este proceso debe ser dirigido más por los constreñimientos que por las instrucciones. Por tanto debemos ser conscientes que esa variabilidad proviene de esas primeras fases exploratorias.
Por otra parte, debemos tener claro, que en deportistas expertos, que dominan los gestos técnicos la variabilidad debe ser buscada. Debemos crear entornos cambiantes que pongan al sistema a prueba, para mejorar la capacidad de adaptación del mismo. Por tanto deberemos ser capaces de crear entornos muy ricos a nivel perceptivo-motriz para retar al sistema a buscar variabilidad en sus respuestas, algo que tendrá una transferencia clara a su práctica deportiva real.
Por último, debemos tener en cuenta, que la variabilidad será siempre positiva si el resultado de la tarea es eficaz. Por ejemplo, en un tiro libre en baloncesto, los grados de libertad existentes son muchos, podemos optar por infinitas combinaciones de las articulaciones de codo, hombro, muñeca etc. Pero sólo serán válidas aquellas que produzcan un resultado positivo, es decir aquellas qué consigan canasta. Todas aquellas que no sean eficaces no pueden ser entendidas cómo variabilidad positiva. Esto es evidente que debe tenerse en cuenta a la hora de diseñar las tareas, no todas las opciones de movimiento deben ser bienvenidas.
Comentarios
Publicar un comentario